Schneckengetriebesysteme können über die Leistung von Präzisionsmaschinen entscheiden. Schlechte Konstruktionsentscheidungen führen zu katastrophalen Ausfällen, übermäßigem Verschleiß und kostspieligen Ausfallzeiten, die ganze Produktionslinien unterbrechen.
Ein Schneckengetriebe ist ein mechanisches Kraftübertragungssystem, bei dem eine Gewindeschnecke (Schnecke) in ein Zahnrad eingreift und durch Gleitkontakt hohe Untersetzungsverhältnisse erzeugt, die eine präzise Bewegungssteuerung und Selbsthemmung ermöglichen.

Ich habe Schneckenantriebssysteme für kritische Anwendungen entwickelt, bei denen ein Ausfall nicht in Frage kommt. Dieser Leitfaden deckt alles ab, von den grundlegenden mechanischen Prinzipien bis hin zu fortschrittlichen Techniken zur Beseitigung des Spiels, und vermittelt Ihnen das Wissen, um zuverlässige Systeme zu entwickeln.
Was ist die grundlegende mechanische Wirkung eines Schneckenantriebs?
Die Funktionsweise eines Schneckenantriebs ist einfach, aber leistungsstark. Stellen Sie sich eine Schraube vor, die sich gegen ein Zahnrad dreht. Das ist das Grundprinzip. Das Gewinde der Schraube oder "Schnecke" greift in die Zähne des Zahnrads ein.
Das Zusammenspiel von Schraube und Getriebe
Die Drehung der Schnecke zwingt das Zahnrad zum Drehen. Im Gegensatz zu typischen Zahnrädern, die gegeneinander rollen, gleitet das Gewinde der Schnecke über die Zähne des Zahnrads. Dies ist die entscheidende mechanische Wirkung.
Gleitender Kontakt vs. rollender Kontakt
Diese Gleitbewegung ist entscheidend. Sie bestimmt fast alle Eigenschaften des Antriebs. Die Dominanz des Gleitens gegenüber dem Rollkontakt ist entscheidend.
| Kontakt Typ | Primäre Bewegung | Schlüsselmerkmal |
|---|---|---|
| Schieben | Oberflächen reiben | Hohe Reibung |
| Rollender | Oberflächen rollen | Geringe Reibung |
Diese Unterscheidung ist grundlegend für das Verständnis von Schneckenantrieben.

Diese grundlegende Gleitbewegung hat erhebliche Auswirkungen. Die ständige Reibung zwischen dem Schneckengewinde und dem Zahnradzahn erzeugt erhebliche Reibung. Dies ist ein wichtiger Kompromiss bei jeder Schnecken- und Schneckenradkonstruktion.
Reibung und ihre Nebenprodukte
Hohe Reibung bedeutet einen geringeren Wirkungsgrad im Vergleich zu anderen Getriebetypen. Ein großer Teil der eingesetzten Energie geht als Wärme verloren. Dies erfordert oft robuste Schmier- und manchmal auch Kühlsysteme, insbesondere bei Hochleistungsanwendungen, mit denen wir bei PTSMAKE arbeiten. Diese Wärme muss beherrscht werden.
Erzielung hoher Reduktionsquoten
Diese Gleitbewegung ermöglicht jedoch unglaubliche Untersetzungsverhältnisse mit einer einzigen Stufe. Bei einer vollen Umdrehung der Schnecke wird das Zahnrad möglicherweise nur um einen einzigen Zahn weitergeschaltet. Auf diese Weise erreichen kompakte Pakete Untersetzungen von 50:1 oder sogar 100:1. Das Besondere Schrägungswinkel1 des Schneckengewindes ist hier ein entscheidender Konstruktionsfaktor.
Die Beziehung zwischen Aktion und Leistung
Die Leistung des Antriebs ist direkt mit dieser gleitenden Wechselwirkung verbunden. Dies zu verstehen, hilft bei der Auswahl der richtigen Materialien und des Designs für eine optimale Lebensdauer und Effizienz.
| Merkmal | Ursache | Konsequenz |
|---|---|---|
| Hohe Reibung | Gleitender Kontakt | Wärmeerzeugung, geringerer Wirkungsgrad |
| Hohe Reduktion | Schraube Aktion | Kompakte Größe, hohes Drehmoment |
| Selbstverriegelung | Hohe Reibung und Neigung | Unfähigkeit zum Rückwärtsfahren |
Dieses Zusammenspiel macht in vielen Anwendungen den Kernwert des Systems aus.
Die grundlegende Funktionsweise des Schneckenantriebs besteht darin, dass das Gewinde einer Schraube gegen die Zähne eines Zahnrads gleitet. Diese gleitende Bewegung mit hoher Reibung ist sowohl für die hohen Untersetzungsverhältnisse als auch für die inhärente Ineffizienz verantwortlich und macht sie zu einem speziellen, aber sehr effektiven mechanischen Bauteil.
Was definiert den Steigungswinkel der Schnecke und seine entscheidende Rolle?
Der Steigungswinkel ist mehr als nur ein Maß. Er ist das Herzstück der Leistung eines Schneckengetriebes. Er bestimmt, wie effizient das System läuft.
Sie bestimmt auch, ob der Mechanismus "selbsthemmend" sein kann. Das bedeutet, dass das Schneckenrad die Schnecke nicht antreiben kann.
Betrachten Sie dies als eine grundlegende Designentscheidung. Sie tauschen Effizienz gegen Kontrolle. Diese Entscheidung hat Auswirkungen auf die Funktion der gesamten Maschine.
| Steigungswinkel | Schlüsselmerkmal | Allgemeiner Anwendungsfall |
|---|---|---|
| Klein | Selbsthemmend, geringerer Wirkungsgrad | Heben, Heben |
| Groß | Hoher Wirkungsgrad, nicht blockierend | Kontinuierliche Leistungsübertragung |
Der Kompromiss: Effizienz vs. Selbstverriegelung
Der Steigungswinkel steht in einem umgekehrten Verhältnis zur Selbsthemmung. Dies zu verstehen, ist für die Konstruktion von Schnecken und Schneckenrädern entscheidend. Ein kleinerer Steigungswinkel erzeugt mehr Reibung. Diese Reibung verhindert, dass das Schneckenrad die Schnecke zurücktreibt.
Diese Selbsthemmung ist von unschätzbarem Wert für Anwendungen wie Hebezeuge oder Wagenheber. Sie bietet eine eingebaute Sicherheitsbremse. Diese erhöhte Reibung bedeutet jedoch eine geringere Effizienz. Es geht mehr Energie in Form von Wärme verloren.
Umgekehrt verringert ein größerer Steigungswinkel die Reibung. Dies führt zu einem reibungsloseren Betrieb und einer höheren Effizienz. Die Leistung wird mit minimalem Verlust übertragen. Diese Systeme sind ideal für Anwendungen mit kontinuierlicher Bewegung. Allerdings verlieren sie den Vorteil der Selbsthemmung. Die Reibungskoeffizient2 zwischen den Materialien ist weniger wichtig, um Rückwärtsfahren zu verhindern.
Bei PTSMAKE helfen wir unseren Kunden dabei, dies zu bewältigen. Wir analysieren die Anforderungen der Anwendung, um das perfekte Gleichgewicht zu finden.
Vergleich von Steigungswinkeleffekten
| Merkmal | Niedriger Steigungswinkel (< 5°) | Hoher Steigungswinkel (> 10°) |
|---|---|---|
| Wirkungsgrad | Unterteil (30-50%) | Höher (50-90%+) |
| Selbstverriegelung | Ja | Nein |
| Wärmeerzeugung | Hoch | Niedrig |
| Primäre Zielsetzung | Positionelles Halten | Kraftübertragung |
Die entscheidende Rolle beim Anwendungsdesign
Die Wahl des richtigen Steigungswinkels ist ein entscheidender Schritt. Es geht nicht nur um eine einzelne Komponente. Sie wirkt sich auf die Zuverlässigkeit und Leistung des gesamten Systems aus. Eine schlechte Wahl kann zu Ineffizienz oder Ausfall führen.
Die Verwendung eines Hochleistungsgetriebes in einer Hebevorrichtung wäre zum Beispiel gefährlich. Es könnte ohne ein separates Bremssystem versagen.
Der Steigungswinkel ist ein zentraler Parameter. Er definiert das grundlegende Verhalten des Schneckenradsatzes.
Kurz gesagt, der Steigungswinkel der Schnecke ist ein klarer Kompromiss. Sie müssen sich zwischen einer hohen Betriebseffizienz und der inhärenten Sicherheit der Selbsthemmung entscheiden. Diese Entscheidung ist von grundlegender Bedeutung für ein erfolgreiches Schneckengetriebesystem und darf nicht übersehen werden.
Welches sind die wesentlichen geometrischen Parameter eines Schneckenradpaares?
Das Verständnis eines Schneckenradpaares beginnt mit seinen grundlegenden geometrischen Parametern. Diese Werte sind nicht nur Zahlen auf einem technischen Datenblatt. Sie sind der Bauplan für das gesamte System.
Diese Parameter steuern direkt die Leistung des Getriebes. Sie wirken sich auf das Endgeschwindigkeitsverhältnis, die Drehmomentkapazität und sogar auf die Größe aus. Die richtige Wahl dieser Parameter ist für jede erfolgreiche Anwendung von entscheidender Bedeutung.
Bei PTSMAKE beginnt die Präzision mit diesen Kerndefinitionen.
| Parameter | Primäre Rolle |
|---|---|
| Anzahl der Starts | Beeinflusst Geschwindigkeit und Effizienz |
| Anzahl von Zähnen | Legt das Untersetzungsverhältnis fest |
| Modul/Teilung | Bestimmt die Größe und Stärke der Zähne |
| Abstand zum Zentrum | Bestimmt das Layout der Baugruppe |
| Eingriffswinkel | Beeinflusst Kraftübertragung und Kontakt |

Lassen Sie uns aufschlüsseln, wie diese Parameter in der Praxis zusammenwirken. Das Zusammenspiel zwischen ihnen bestimmt das endgültige Design und ist ein zentraler Bestandteil eines effektiven Schnecken- und Schneckenraddesigns.
Anzahl der Anfänge und Zähne
Das Übersetzungsverhältnis ist einfach die Anzahl der Zähne des Rades geteilt durch die Anzahl der Schneckengänge. Ein Rad mit 60 Zähnen und einer zweigängigen Schnecke ergibt ein Verhältnis von 30:1. Dies ist oft der erste Parameter, der im Entwurfsprozess festgelegt wird.
Modul oder diametraler Teilung
Das Modul bestimmt die Größe der Verzahnung. Ein größeres Modul führt zu größeren, stärkeren Zähnen, die mehr Drehmoment aufnehmen können. Allerdings erhöht sich dadurch auch die Gesamtgröße der Schnecke und des Rades, was möglicherweise nicht in die Konstruktionsvorgaben passt.
Abstand zum Zentrum
Dies ist der physische Abstand zwischen der Mittellinie der Schnecke und der Mittellinie des Schneckenrads. Es handelt sich um ein kritisches Maß, das oft durch die Konstruktion des Gehäuses festgelegt ist. Alle anderen Parameter müssen so berechnet werden, dass sie diesem spezifischen Abstand genau entsprechen.
Blickwinkel des Engagements
Der Eingriffswinkel bestimmt, wie die Kräfte zwischen den Zähnen übertragen werden. Die Steigungswinkel3 der Schnecke ist ebenso wichtig, da sie für einen reibungslosen Betrieb mit der Spirale des Rades fluchten muss. Die Optimierung dieser Winkel ist der Schlüssel zur Maximierung der Effizienz und Minimierung des Verschleißes.
| Parameter Auswirkungen | Leistung - Konsequenz |
|---|---|
| Verhältnis (Starts vs. Zähne) | Regelt Abtriebsdrehzahl und Drehmoment |
| Modul | Wirkt sich direkt auf Kraft und Körpergröße aus |
| Abstand zum Zentrum | Eine primäre physikalische Einschränkung für das Getriebe |
| Druck & Steigungswinkel | Beeinflusst die Effizienz, den Lärm und die Laufruhe |
Zusammenfassend lässt sich sagen, dass die wesentlichen geometrischen Parameter eines Schneckengetriebes aus einer Reihe miteinander verbundener Variablen bestehen. Die Änderung eines Parameters, z. B. der Anzahl der Gänge, um die Geschwindigkeit zu ändern, erfordert die Anpassung anderer Parameter, um die ordnungsgemäße Funktion und die Einpassung in den vorgesehenen Raum zu gewährleisten.
Was ist das Prinzip der Selbsthemmung bei der Konstruktion von Schneckenrädern?
Die Selbsthemmung von Schnecken und Schneckenrädern ist ein faszinierendes und kritisches Merkmal. Alles läuft auf einen einfachen Kampf zwischen Geometrie und Reibung hinaus. Stellen Sie sich das wie ein Einbahntor für Kraft vor.
Die Rolle von Winkeln
Das Verhalten des Systems wird von zwei Schlüsselwinkeln bestimmt: dem Steigungswinkel und dem Reibungswinkel. Wenn die Reibung überwiegt, blockiert das System. Dadurch wird verhindert, dass das Schneckenrad die Schnecke rückwärts treibt. Es handelt sich um eine rein mechanische Sicherheitsfunktion.
| Winkeltyp | Beschreibung | Rolle bei der Selbstverriegelung |
|---|---|---|
| Steigungswinkel (λ) | Der Winkel des Gewindes der Schnecke. | Stellt die Fahrgeometrie dar. |
| Reibungswinkel (φ) | Wird durch die Reibung der Materialien bestimmt. | Stellt die Widerstandskraft dar. |
Dieses Prinzip ist grundlegend für die Entwicklung sicherer und zuverlässiger Getriebesysteme für spezifische Anwendungen.

Ein tieferer Blick: Die Physik des Sperrens
Selbsthemmung tritt auf, wenn der Reibungswinkel größer ist als der Steigungswinkel. Diese einfache Regel hat tiefgreifende Auswirkungen. Der Reibungswinkel selbst ergibt sich aus dem Koeffizient der statischen Reibung4 zwischen den Passflächen der Schnecke und des Rades.
Wenn das Schneckenrad versucht, die Schnecke anzutreiben, wird der Kraft, die es aufbringt, größtenteils durch Reibung widerstanden. Wenn der Steigungswinkel zu klein ist (kleiner als der Reibungswinkel), ist die Kraftkomponente, die die Schnecke zu drehen versucht, nicht stark genug, um die Reibungskraft zu überwinden. Das System klemmt oder "blockiert" einfach.
Design für Sicherheit
Bei PTSMAKE machen wir uns dieses Prinzip häufig bei sicherheitskritischen Anwendungen zunutze. Bei Geräten wie Aufzügen oder Hebeböcken kann die Last den Motor nicht zurücktreiben, wenn der Strom ausfällt. Eine selbsthemmende Schnecke und ein Schneckenrad sind die perfekte Lösung.
Hier ist der Zustand aufgeschlüsselt:
| Zustand | Ergebnis | Kann das Rad die Schnecke antreiben? |
|---|---|---|
| Reibungswinkel > Steigungswinkel | Selbstverriegelung | Nein |
| Reibungswinkel < Steigungswinkel | Nicht sperrend (rückfahrbar) | Ja |
Die Wahl der richtigen Materialien und Schmiermittel ist entscheidend. Unsere Tests haben ergeben, dass die Kombination einer Stahlschnecke mit einem Bronzerad ein vorhersehbares Reibungsniveau bietet, was die Konstruktion einer zuverlässigen Selbsthemmung erleichtert. Dies ist ein zentraler Aspekt unseres Entwicklungsprozesses für Schnecken und Schneckenräder.
Die Selbsthemmung wird erreicht, wenn der Reibungswinkel größer ist als der Steigungswinkel. Diese mechanische Eigenschaft verhindert, dass das Schneckenrad die Schnecke zurücktreiben kann, und ist somit ein entscheidendes Sicherheitsmerkmal bei Anwendungen wie Hebezeugen und Wagenhebern, bei denen eine Lastumkehr verhindert werden muss.
Was sind die unverzichtbaren Materialeigenschaften für Schnecken und Räder?
Die Leistung eines Schneckenradsatzes hängt von einem entscheidenden Gegensatz ab. Die Schnecke und das Rad müssen unterschiedliche Materialeigenschaften haben.
Das ist kein Zufall, sondern gewollt. Die Schnecke ist immer die härtere Komponente. Das Rad ist absichtlich aus einem weicheren, nachgiebigeren Material gefertigt.
Durch diesen grundlegenden Unterschied wird die starke Gleitreibung ausgeglichen. Er sorgt dafür, dass das System reibungslos funktioniert und länger hält. Das Verständnis dieses Unterschieds ist der Schlüssel zur erfolgreichen Konstruktion von Schnecken und Schneckenrädern.
| Komponente | Wichtigste Eigenschaft | Allgemeines Material |
|---|---|---|
| Wurm | Härte & Geschmeidigkeit | Gehärteter Stahl |
| Rad | Anpassungsfähigkeit und geringe Reibung | Bronze |

Um den hohen Gleitkontakt zu bewältigen, agieren Schnecke und Rad als ein spezialisiertes Team. Jedes Teil hat eine bestimmte Rolle, die durch sein Material definiert ist. Dies ist ein klassisches Beispiel für intelligente Technik, bei der die Materialien so ausgewählt werden, dass sie zusammen und nicht gegeneinander arbeiten.
Der Wurm: Hart und glatt
Die Schnecke hat die Aufgabe, ständigem Gleiten unter hohem Druck standzuhalten. Hierfür benötigt sie eine außergewöhnliche Härte. Gehärteter Stahl ist eine gängige Wahl, da er dem Verschleiß wirksam widersteht.
Eine harte Oberfläche allein ist nicht ausreichend. Die Schnecke muss auch geschliffen und poliert werden, um eine sehr glatte Oberfläche zu erhalten. Dadurch wird die Reibung minimiert, was wiederum die Wärmeentwicklung verringert und den Gesamtwirkungsgrad verbessert. Eine raue Schnecke würde das Rad schnell zerstören.
Das Rad: Nachgiebig und selbstschmierend
Das Rad muss andere Eigenschaften aufweisen. Es ist so konzipiert, dass es der weichere Teil des Paares ist. Materialien wie Bronze oder bestimmte Polymere sind ideal.
Durch diese Weichheit kann sich das Rad "einschleifen" und an das Profil der Schnecke anpassen. Dieser Prozess vergrößert die Kontaktfläche und verteilt die Last gleichmäßiger. Er dient auch als Ausfallsicherung; das billigere Rad soll sich zuerst abnutzen, ein Beispiel für aufopfernder Verschleiß5. Bronze bietet außerdem hervorragende Gleiteigenschaften, wenn sie gegen Stahl läuft, was den Bedarf an ständiger Schmierung reduziert.
Bei PTSMAKE beraten wir unsere Kunden bei der Auswahl dieser Materialpaarung, um die Langlebigkeit ihrer Baugruppen zu optimieren.
Der Materialkontrast in einem Schneckenantrieb ist nicht verhandelbar. Eine harte, glatte Schnecke gewährleistet Beständigkeit gegen Gleitkräfte. Ein weicheres, reibungsarmes Rad passt sich der Schnecke an und verschleißt vorhersehbar, wodurch das gesamte System geschützt und eine reibungslose, effiziente Kraftübertragung gewährleistet wird.
Was ist der Unterschied zwischen ein- und mehrgängigen Würmern?
Der wirkliche Unterschied besteht nicht nur im Zählen von Threads. Es geht um Funktion und Leistung. Eine mehrgängige Schnecke verändert die gesamte Dynamik des Zahnradsatzes.
Sie vergrößert den Steigungswinkel der Schnecke. Diese einzige Änderung hat einen weitreichenden Effekt. Sie erhöht direkt die Geschwindigkeit und Effizienz.
Das hat allerdings seinen Preis. Sie erhalten eine niedrigere Getriebeübersetzung. Auch die Selbsthemmung nimmt deutlich ab.
Die Wahl hängt von der Priorität Ihrer Anwendung ab.
| Merkmal | Einzelstart-Schnecke | Multi-Start-Schnecke |
|---|---|---|
| Steigungswinkel | Klein | Groß |
| Geschwindigkeit | Unter | Höher |
| Wirkungsgrad | Unter | Höher |
| Übersetzungsverhältnis | Hoch | Niedrig |

Vertiefung der funktionalen Kompromisse
Bei der Wahl der richtigen Schnecke müssen konkurrierende Faktoren gegeneinander abgewogen werden. Ein größerer Steigungswinkel bei einer mehrgängigen Schnecke bedeutet weniger Gleit- und mehr Rollkontakt. Dies ist der Schlüssel zu ihrem höheren Wirkungsgrad.
Bei unserer Arbeit bei PTSMAKE haben wir diese Auswirkungen gesehen kinematischer Wirkungsgrad6 aus erster Hand. Ein besserer Wirkungsgrad bedeutet, dass weniger Energie in Form von Wärme verschwendet wird. Dies kann bei Anwendungen im Dauerbetrieb entscheidend sein.
Der Kompromiss ist die Kontrolle. Eine einstufige Schnecke bietet ein sehr hohes Übersetzungsverhältnis. Dies bedeutet eine präzise, langsame Bewegung und eine hohe Drehmomentvervielfachung. Sie hat oft eine natürliche Selbsthemmung, die sich hervorragend zum Halten von Lasten eignet.
Bei einer mehrgängigen Schnecke ist dies nicht der Fall. Der steilere Winkel macht es dem Schneckenrad leichter, die Schnecke zurückzutreiben. Dies ist ein entscheidender Punkt bei der richtigen Konstruktion von Schnecke und Schneckenrad. Sie müssen entscheiden, ob Sie Geschwindigkeit oder Haltekraft benötigen.
Anwendungsbezogene Auswahlmöglichkeiten
| Anwendung Bedarf | Empfohlener Schneckentyp | Begründung |
|---|---|---|
| Hebezeuge, Aufzüge | Einmaliges Starten | Eine hohe Getriebeübersetzung und Selbstsperrung sind entscheidend für die Sicherheit. |
| Fördersysteme | Multi-Start | Höhere Geschwindigkeit und Effizienz sind für den Durchsatz erforderlich. |
| Indizierungstabellen | Einmaliges Starten | Hohe Präzision und Positionserhalt sind die Hauptziele. |
| Hochgeschwindigkeits-Reduzierer | Multi-Start | Der Schwerpunkt liegt auf einer effizienten Geschwindigkeitsreduzierung, nicht auf der Sperrung. |
Die Wahl zwischen ein- und mehrgängigen Schnecken ist eine wichtige Designentscheidung. Mehrgängige Schnecken bieten Geschwindigkeit und Effizienz, während eingängige Schnecken eine hohe Untersetzung und Selbsthemmung bieten. Die beste Wahl hängt immer von den spezifischen funktionalen Anforderungen der Anwendung ab.
Was sind die grundlegenden Funktionen der Schmierung in Schneckenantrieben?
Die Schmierung von Schneckenantrieben ist nicht nur ein zusätzliches Element. Sie ist ein grundlegender Bestandteil der Konstruktion des Systems. Ihre Hauptaufgabe ist es, die Reibung zu verringern.
Diese starke Reibung entsteht zwischen den Gleitflächen der Schnecke und des Rades. Eine Vernachlässigung der Schmierung führt zu einem schnellen Ausfall.
Die drei Säulen der Schmierung von Schneckenantrieben
Eine ordnungsgemäße Schmierung erfüllt drei wesentliche Funktionen. Jede von ihnen ist entscheidend für Leistung und Haltbarkeit.
| Primäre Funktion | Schlüsselrolle bei Schneckenantrieben |
|---|---|
| Reibungsreduzierung | Minimiert den Widerstand zwischen Schnecke und Rad. |
| Wärmeableitung | Kühlt das System, indem es die Wärme abführt. |
| Oberflächenschutz | Verhindert Verschleiß, Riefenbildung und chemische Korrosion. |
Es ist wichtig, sie als Kernkomponente zu betrachten.

Die Wahl des Schmiermittels ist genauso wichtig wie die Verzahnungsgeometrie selbst. Die falsche Flüssigkeit kann mehr schaden als nützen und zu vorzeitigem Versagen und kostspieligen Ausfallzeiten führen. Eine Entscheidung, die wir bei unseren Projekten bei PTSMAKE nie auf die leichte Schulter nehmen.
Eine eingehende Analyse der Rolle der Schmierung
Sehen wir uns an, warum jede Funktion so wichtig ist. Die einzigartige Gleitbewegung eines Schneckenantriebs macht die Schmierung zu einer komplexen Herausforderung. Das ist nicht wie bei anderen Zahnradsätzen.
Umgang mit Reibung und Hitze
Der ständige Gleitkontakt erzeugt erhebliche Wärme. Eine Hauptaufgabe des Schmiermittels besteht darin, einen Film zu erzeugen, der die Stahlgewinde der Schnecke von den weicheren Bronzezähnen des Rades trennt. Dadurch wird der direkte Kontakt von Metall zu Metall minimiert.
Gleichzeitig wirkt der Schmierstoff als Kühlmittel. Es nimmt die Wärmeenergie von der Kontaktstelle auf und leitet sie an das Getriebegehäuse weiter, wo sie abgeführt werden kann. Ohne diese Funktion würden die Temperaturen schnell ansteigen und die Materialintegrität gefährden. Dies ist ein zentraler Aspekt bei jeder robusten Schnecken- und Schneckenradkonstruktion.
Schutz von Oberflächen vor Beschädigung
Der Schmierstoff wirkt auch als Schutzschild. Er verhindert Riefenbildung und Verschleiß an den Zahnradoberflächen. Die im Öl enthaltenen Additive bilden eine chemische Schutzschicht, die unter den in Schneckenantrieben häufig auftretenden Hochdruckbedingungen unerlässlich ist. Dieser Zustand ist bekannt als Grenzschmierung7.
| Fehlermodus | Unmittelbare Ursache |
|---|---|
| Lochfraß und Ritzen | Abbau des Schmierfilms unter Druck. |
| Überhitzung | Unzureichende Wärmeabfuhr durch das Öl. |
| Korrosion | Verunreinigung durch Feuchtigkeit und falsche Zusatzstoffe. |
Außerdem schützt es vor Rost und Korrosion und verlängert so die Lebensdauer der gesamten Baugruppe.
Die Schmierung von Schneckenantrieben ist eine multifunktionale Komponente. Sie reduziert die Reibung, leitet Wärme ab und schützt die Oberflächen vor Verschleiß und Korrosion. Ihre Behandlung als kritisches Konstruktionselement und nicht als nachträgliche Maßnahme ist entscheidend für eine zuverlässige und langlebige Leistung.
Welches sind die wichtigsten Klassifizierungen von Schneckenradtypen?
Bei der Auswahl eines Schneckengetriebes wird häufig zwischen zwei Hauptfamilien unterschieden. Dies sind zylindrische und globoide Schnecken.
Der Hauptunterschied liegt in der Geometrie der Schnecke. Diese hat einen direkten Einfluss auf die Kontaktfläche mit dem Schneckenrad.
Diese einzelne Konstruktionsentscheidung wirkt sich auf Leistung, Komplexität und Gesamtkosten aus. Die richtige Konstruktion von Schnecken und Schneckenrädern hängt vom Verständnis dieser Unterscheidung ab.
| Typ | Hauptmerkmal | Am besten für |
|---|---|---|
| Zylindrisch | Gerades Schneckenprofil | Allgemeine Anwendungen |
| Globoid | Profil der Sanduhr-Schnecke | Hochbelastete Aufgaben |

Eine genauere Betrachtung dieser beiden Familien zeigt klare Kompromisse auf. Bei PTSMAKE unterstützen wir unsere Kunden bei dieser Entscheidung, um das Design auf ihre spezifischen Anwendungsanforderungen abzustimmen. Bei der Entscheidung geht es selten darum, was "besser" ist, sondern was "richtig" ist.
Zylindrische (einhüllende) Würmer
Dies ist der häufigste Typ. Die Schnecke hat eine gerade, zylindrische Form, ähnlich wie ein Schraubengewinde.
Kontaktfläche und Tragfähigkeit
Der Kontakt zwischen den Schneckengewinden und den Radzähnen erfolgt entlang einer Linie. Dadurch wird die Fläche für die Kraftübertragung begrenzt.
Daher haben einhüllende Schneckenräder eine geringere Tragfähigkeit als ihre globoiden Gegenstücke. Sie eignen sich hervorragend für Anwendungen mit mittlerem Drehmoment und für allgemeine Anwendungen.
Komplexität und Kosten
Ihre einfache Geometrie macht ihre Herstellung einfacher und kostengünstiger. Es können Standardwerkzeuge verwendet werden, was die Produktionskosten niedrig hält. Dies macht sie zu einer kosteneffizienten Lösung für viele Projekte.
Globoide (sich doppelt entwickelnde) Würmer
Diese Konstruktion ist fortschrittlicher. Die Schnecke hat eine Sanduhr- oder konkave Form, so dass sie sich teilweise um das Schneckenrad wickeln kann.
Kontaktfläche und Tragfähigkeit
Diese "umhüllende" Form schafft eine viel größere Kontaktfläche. Anstelle einer Linie ist der Kontakt eine Fläche. Die konjugierte Aktion8 auf mehrere Zähne gleichzeitig verteilt wird.
Dadurch werden die Tragfähigkeit und die Stoßfestigkeit deutlich erhöht. Unsere Tests haben ergeben, dass sie bis zu dreimal mehr Last aufnehmen können als eine zylindrische Schnecke derselben Größe.
Komplexität und Kosten
Die komplexe Geometrie macht die Herstellung schwierig und teuer. Sie erfordert spezielle Maschinen und eine präzise Ausrichtung bei der Montage. Eine Fehlausrichtung kann schnell zu einem Ausfall führen, wodurch die gesamte Schnecken- und Schneckenradkonstruktion kritischer wird.
| Merkmal | Zylindrisch (einfach-entwickelnd) | Globoid (Doppelentwickelnd) |
|---|---|---|
| Kontakt Muster | Linienkontakt | Kontakt zum Gebiet |
| Tragfähigkeit | Standard | Hoch |
| Wirkungsgrad | Gut | Sehr hoch |
| Herstellungskosten | Unter | Höher |
| Ausrichtungsempfindlichkeit | Weniger empfindlich | Hochsensibel |
Zusammenfassend lässt sich sagen, dass die Entscheidung zwischen Leistung und Kosten abzuwägen ist. Zylindrische Schnecken sind eine praktische, kostengünstige Wahl für die meisten Anwendungen. Globoidschnecken bieten eine höhere Tragfähigkeit für schwere Aufgaben, erfordern aber eine höhere Fertigungspräzision und ein höheres Budget.
Was sind die häufigsten Fehlerarten bei der Konstruktion von Schnecken und Rädern?
Der erste Schritt zur Vorbeugung ist das Verständnis von Fehlern im Schnecken- und Raddesign. Misserfolge sind nicht zufällig, sie hinterlassen Spuren. Das Erkennen dieser Anzeichen hilft uns, die Ursache zu diagnostizieren und künftige Konstruktionen zu verbessern.
Verschiedene Fehler zeigen sich auf einzigartige Weise. Sie richtig zu identifizieren ist entscheidend für eine effektive Fehlersuche. Meiner Erfahrung nach lassen sich die meisten Probleme in einige wenige gemeinsame Kategorien einteilen.
Im Folgenden finden Sie einen kurzen Überblick über die verschiedenen Angebote.
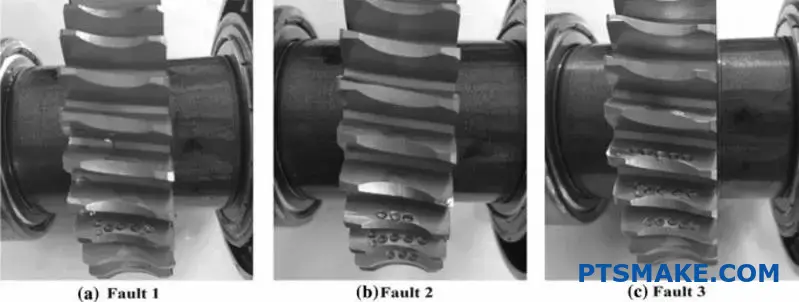
| Fehlermodus | Primärer visueller Anhaltspunkt |
|---|---|
| Lochfraß | Kleine Krater auf der Getriebeoberfläche |
| Tragen Sie | Verlust von Material, glatt oder rau |
| Biegung/Bruch | Verformte oder gebrochene Schneckengewinde |
| Punktevergabe | Tiefe Kratzer oder Furchen entlang der Gleitrichtung |
Jeder Modus weist auf ein bestimmtes zugrunde liegendes Problem hin.
Verknüpfung von Fehlern mit den Grundursachen
Jeder Ausfall erzählt eine Geschichte über die Lebensdauer des Getriebes. Die Rückverfolgung des Fehlers bis zu seinem Ursprung ist entscheidend. Auf diese Weise bauen wir bei PTSMAKE robustere und zuverlässigere Systeme.
Lochfraß und Oberflächenermüdung
Pitting sieht aus wie kleine Hohlräume auf der Oberfläche der Zahnräder. Es ist ein klassisches Anzeichen für Oberflächenermüdung. Diese entsteht durch hohe, wiederholte Kontaktbelastungen, die die Belastungsgrenze des Materials überschreiten. Die Hauptursache ist oft eine Überlastung oder eine unzureichende Oberflächenhärte.
Abrasiver und adhäsiver Verschleiß
Das weichere Bronzerad ist besonders anfällig für Verschleiß. Abrasiver Verschleiß entsteht durch harte Partikel im Schmiermittel. Diese Verunreinigungen schleifen das Radmaterial ab. Adhäsiver Verschleiß tritt auf, wenn das Schmiermittel versagt, was zu Metall-zu-Metall-Kontakt und Materialübertragung führt.
Biegen und Brechen
Ein verbogenes oder gebrochenes Schneckengewinde ist ein katastrophales Versagen. Dies wird fast immer durch eine plötzliche Stoßbelastung oder eine starke Überlastung verursacht. Es deutet darauf hin, dass die auf das System einwirkenden Kräfte die Konstruktionsfestigkeit der Schnecke weit übersteigen.
Ausfall der Schmierung und Rillenbildung
Punktevergabe9 ist durch tiefe Kratzer entlang der Gleitrichtung gekennzeichnet. Dies ist eine direkte Folge des Zusammenbruchs der Schmierung. Der Ölfilm wird dünner, so dass hohe Punkte auf den Oberflächen zusammenschweißen und dann abreißen können.
| Fehlermodus | Wahrscheinliche Grundursache |
|---|---|
| Lochfraß | Überlastung, Materialermüdung |
| Abrasive Abnutzung | Verunreinigtes Schmiermittel |
| Klebstoff-Verschleiß | Unzureichende Schmierung, hoher Druck |
| Biegung/Bruch | Extreme Stoßbelastung oder Überlastung |
| Punktevergabe | Zusammenbruch des Schmierfilms aufgrund von Hitze/Druck |
Es ist wichtig, diese häufigen Fehlerarten zu verstehen. Jede von ihnen, von Grübchenbildung bis zum Bruch, weist auf eine bestimmte Ursache hin. Die Identifizierung dieser Ursachen, wie z. B. Überlastung oder schlechte Schmierung, ermöglicht eine wirksame Umgestaltung und Vorbeugung und gewährleistet eine bessere Leistung der Schnecken und Schneckenräder.
Wie strukturieren die Materialpaarungen den Designauswahlprozess?
Die Wahl der richtigen Materialien ist entscheidend für die Konstruktion. Dies gilt insbesondere für die Konstruktion von Schnecken und Schneckenrädern. Der Prozess ist nicht zufällig, sondern folgt einem klaren Weg.
Der klassische Startpunkt
Die meisten Konstruktionen beginnen mit einer Standardpaarung. Dies ist in der Regel eine Schnecke aus einsatzgehärtetem Stahl mit einem Rad aus Phosphorbronze. Diese Kombination ist für ihre Zuverlässigkeit und Leistung unter anspruchsvollen Bedingungen bekannt. Sie bietet ein hervorragendes Gleichgewicht aus Festigkeit und geringer Reibung.
Ein Rahmen für die Entscheidungsfindung
Eine Größe ist jedoch nicht für alle geeignet. Ihre spezifische Anwendung entscheidet über die beste Wahl. Wir verwenden einen Entscheidungsbaum, um diese Auswahl zu treffen. Er hilft, Faktoren wie Belastung, Umgebung und Budget abzuwägen.
| Komponente | Standard-Material | Hauptvorteil |
|---|---|---|
| Wurm | einsatzgehärteter Stahl | Hohe Festigkeit und Verschleißbeständigkeit |
| Schneckenrad | Phosphor-Bronze | Geringe Reibung und gute Anpassungsfähigkeit |
Diese Tabelle zeigt die Standardauswahl. Lassen Sie uns nun untersuchen, wie sich der Entscheidungspfad je nach Projektanforderungen ändern kann.

Ein praktischer Entscheidungsbaum
Ein Entscheidungsbaum vereinfacht komplexe Entscheidungen. Er beginnt mit der wichtigsten Frage und verzweigt sich dann. Bei der Konstruktion einer Schnecke und eines Schneckenrads ist der wichtigste Faktor fast immer die Betriebslast.
Hochbelastete Anwendungen
Für hohe Drehmomente und Dauerbetrieb ist die Paarung von Stahl und Bronze unübertroffen. Die ungleichen Metalle haben hervorragende tribologische Eigenschaften10. Diese Paarung minimiert Reibung und Abrieb und gewährleistet eine lange Lebensdauer. Bei früheren Projekten bei PTSMAKE hat sich dies als die dauerhafteste Option erwiesen.
Schwachlastige oder intermittierende Nutzung
Was ist, wenn die Last gering ist? Oder das Gerät nur selten läuft? Dann ist ein Schneckenrad aus Gusseisen eine echte Alternative. Es senkt die Materialkosten erheblich. Es ist jedoch mit einer höheren Reibung und einem schnelleren Verschleiß im Vergleich zu Bronze verbunden. Dies ist ein Kompromiss, den wir mit unseren Kunden abwägen.
Besondere Umweltfaktoren
Nehmen wir ein Getriebe, das in der Lebensmittelverarbeitung eingesetzt wird. Es muss korrosionsbeständig sein. In diesem Fall ist rostfreier Stahl für beide Komponenten die beste Wahl. Er ist zwar teurer, erfüllt aber strenge Hygiene- und Haltbarkeitsstandards.
| Material der Räder | Tragfähigkeit | Kostenfaktor | Korrosionsbeständigkeit |
|---|---|---|---|
| Phosphor-Bronze | Hoch | Hoch | Gut |
| Gusseisen | Niedrig bis mittel | Niedrig | Schlecht |
| Rostfreier Stahl | Hoch | Sehr hoch | Ausgezeichnet |
Dieser Rahmen gewährleistet, dass die endgültige Materialauswahl perfekt auf die vorgesehene Funktion und Umgebung abgestimmt ist.
Die Auswahl von Materialien für eine Schnecke und ein Schneckenrad ist ein strukturierter Prozess. Beginnend mit dem Standardpaar Stahl-Bronze verzweigt sich der Entscheidungsbaum je nach Belastung, Kosten und Umgebung, um die optimale Lösung für Ihre spezifische Anwendung zu finden.
Welche Standardbefestigungsarten gibt es und welche Nachteile ergeben sich daraus?
Die Wahl der Montageart für Ihr Schneckengetriebe ist ein entscheidender Schritt bei der Konstruktion. Dabei geht es um mehr als nur darum, dass es in eine Maschine passt.
Die Ausrichtung wirkt sich direkt auf die Leistung und Lebensdauer des Systems aus. Wir betrachten im Allgemeinen drei gängige Konfigurationen.
Jede Anordnung bringt ihre eigenen Vor- und Nachteile mit sich. Dies betrifft die Schmierung, die Wärme und die Art und Weise, wie die Kräfte auf die Lager wirken. Diese zu verstehen ist entscheidend für eine zuverlässige Schnecken- und Schneckenradkonstruktion.
Übliche Montageausrichtungen
| Montageausrichtung | Primäre Überlegung |
|---|---|
| Schnecke unter dem Rad | Optimale Schmierung |
| Schnecke über Rad | Hochgeschwindigkeitsbetrieb |
| Horizontale Achse | Ausgewogene Leistung |
Diese Entscheidung stellt die Weichen für die langfristige Gesundheit des Getriebes.

Ein tieferer Blick auf jedes Arrangement
Jede Montageart schafft eine einzigartige Betriebsumgebung. Ihre Wahl ist immer eine Abwägung von Kompromissen, die auf den spezifischen Anforderungen der Anwendung basieren.
Der Wurm unter dem Rad
Dies ist oft die beste Schmierungsart. Die Schnecke ist vollständig in ein Ölbad eingetaucht. Dies gewährleistet einen konstanten Ölkontakt und minimiert den Verschleiß, insbesondere bei niedrigen bis mittleren Drehzahlen.
Der größte Nachteil ist die Wärmeentwicklung. Die Schnecke, die das Öl ständig umwälzt, erzeugt zusätzliche Reibung und Wärme, was zu einem Problem werden kann.
Der Wurm über dem Rad
Für Hochgeschwindigkeitsarbeiten ist dies in der Regel vorzuziehen. Es wird weniger Öl aufgewirbelt, so dass das System kühler und effizienter läuft.
Die Schmierung kann jedoch eine Herausforderung sein. Sie müssen den Ölstand sorgfältig verwalten, um sicherzustellen, dass die Spritzschmierung die Schnecke und ihre Lager erreicht.
Horizontale Schneckenachse
Dies ist ein guter Kompromiss und eine solide Allzwecklösung. Es bietet eine gute Schmierung ohne die übermäßige Hitze des Butterns.
Auch die Lagerlasten sind gleichmäßiger verteilt. Bei unseren bisherigen Projekten bei PTSMAKE haben wir festgestellt, dass dies ein zuverlässiger Ausgangspunkt ist. Das Erreichen der richtigen hydrodynamische Schmierung11 ist bei allen Konstellationen wichtig, aber bei dieser ist die Balance gut.
Zusammenfassung der Trade-Offs
| Arrangement | Schmierung | Wärmeableitung | Lagerbelastung | Am besten für |
|---|---|---|---|---|
| Wurm unten | Ausgezeichnet | Messe | Ungleiche | Niedrige bis mittlere Geschwindigkeiten |
| Wurm oben | Messe | Ausgezeichnet | Noch mehr | Hohe Geschwindigkeiten |
| Horizontale Achse | Gut | Gut | Ausgewogene | Allgemeiner Zweck |
Die Wahl der Montage ist eine wichtige technische Entscheidung. Sie wirkt sich direkt auf die Wirksamkeit der Schmierung, das Wärmemanagement und die endgültige Lebensdauer Ihrer Lager aus. Sie geht weit über die einfache Platzierung hinaus und bestimmt die langfristige Zuverlässigkeit und Leistung des Systems.
Wie berechnen Sie die Primärkräfte auf die Schnecke und das Rad?
Die Berechnung der Kräfte in einem Schneckenradsatz ist nicht nur akademisch. Sie ist die Grundlage für ein zuverlässiges mechanisches System. Wenn Sie diesen Schritt verpassen, riskieren Sie einen Ausfall.
Wir konzentrieren uns auf drei Hauptkräfte. Jede von ihnen spielt eine besondere Rolle für den Betrieb und die Langlebigkeit des Getriebes. Die richtige Konstruktion von Schnecke und Schneckenrad hängt davon ab.
Hier ist eine kurze Aufschlüsselung:
| Kraft Typ | Beschreibung |
|---|---|
| Tangentiale Kraft | Die Kraft, die Energie überträgt. |
| Radiale Kraft | Die Kraft, die die Zahnräder auseinander drückt. |
| Axialkraft | Die Schubkraft entlang der Achse der Welle. |
Diese Kräfte zu verstehen, ist der erste Schritt. Es ermöglicht Ihnen, Wellen zu konstruieren und Lager auszuwählen, die langlebig sind.
Ein tieferer Blick auf die Kraftberechnung
Um die Komponenten richtig zu dimensionieren, müssen Sie die Größe dieser Kräfte sowohl auf die Schnecke als auch auf das Rad berechnen. Die Eingaben sind einfach: Drehmoment, Geschwindigkeit und Zahnradgeometrie.
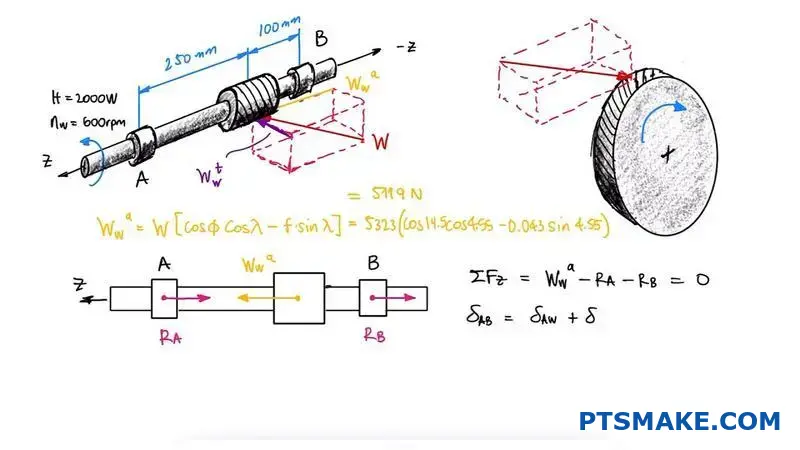
Kräfte, die auf die Schnecke wirken
Die Schnecke erfährt eine tangentiale Kraft (Wt), eine radiale Kraft (Wr) und eine axiale Kraft (Wa). Die tangentiale Kraft wird aus dem Eingangsdrehmoment bestimmt. Die beiden anderen Kräfte werden dann auf der Grundlage der Geometrie des Zahnrads berechnet. Dazu gehören der Steigungswinkel und die Normalkraft. Eingriffswinkel12.
Bei unserer Arbeit bei PTSMAKE haben wir festgestellt, dass die genaue Berechnung der Axialkraft der Schnecke besonders wichtig ist. Diese Kraft ist oft beträchtlich und bestimmt direkt den Typ des für die Anwendung erforderlichen Axiallagers.
Kräfte, die auf das Schneckenrad wirken
Die Kräfte auf das Schneckenrad stehen in direktem Zusammenhang mit den Kräften auf die Schnecke, aber ihre Ausrichtung ist unterschiedlich. Die Kräfte sind gleich groß, aber in entgegengesetzter Richtung.
| Kraft auf Wurm | Entsprechende Kraft am Rad |
|---|---|
| Tangentialkraft (Gewicht) | Axialkraft (Wa_wheel) |
| Axialkraft (Wa) | Tangentialkraft (Wt_wheel) |
| Radialkraft (Wr) | Radialkraft (Wr_wheel) |
Diese Beziehung ist entscheidend. Die tangentiale Kraft auf das Rad (Wt_wheel) erzeugt das Ausgangsdrehmoment. Die Axialkraft auf das Rad bestimmt die Anforderungen an die Lager.
Die Berechnung dieser tangentialen, radialen und axialen Kräfte ist ein unverzichtbarer erster Schritt. Diese wichtigen Daten bilden die Grundlage für die Auswahl geeigneter Lager und die Konstruktion robuster Wellen und gewährleisten die mechanische Integrität und Zuverlässigkeit des gesamten Getriebesystems.
Wie konstruiert man eine Welle für die Schnecke und das Schneckenrad?
Die Konstruktion der Welle ist ein entscheidender Teil jeder Schnecken- und Schneckenradkonstruktion. Es geht um mehr als nur um die Wahl des Durchmessers. Wir müssen alle Kräfte analysieren, die auf die Welle wirken.
Bei diesem Verfahren werden Biegemomente und Drehmomente berechnet. Diese Kräfte ergeben sich direkt aus dem Zusammenspiel der Zahnräder.
Unser Hauptziel ist es, den richtigen Wellendurchmesser zu finden. Er muss stark genug sein, um der Ermüdung zu widerstehen. Außerdem muss er die Durchbiegung begrenzen, damit die Zahnräder reibungslos ineinandergreifen.
Wichtige Entwurfsschritte
| Schritt | Beschreibung |
|---|---|
| 1 | Analysieren Sie Kräfte |
| 2 | Momente und Drehmomente berechnen |
| 3 | Material auswählen |
| 4 | Bestimmen Sie den Durchmesser |
| 5 | Prüfung auf Durchbiegung |
Diese strukturierte Vorgehensweise gewährleistet eine zuverlässige und langlebige Montage.
Nachdem wir im vorherigen Schritt die Kräfte berechnet haben, bilden wir sie auf die Wellen ab. Dies hilft uns, die Biegemomente und Drehmomente entlang der gesamten Länge zu visualisieren. Dies ist ein grundlegender Schritt.
Wir erstellen Scher- und Momentendiagramme sowohl für die Schnecken- als auch für die Radwelle. Diese Diagramme zeigen die Stellen maximaler Belastung auf. Hier ist die Wahrscheinlichkeit eines Versagens am größten. Bei PTSMAKE verwenden wir Software, um die Genauigkeit zu gewährleisten.
Wellen unterliegen sowohl Biege- als auch Torsionsspannungen. Wir kombinieren diese, um die Vergleichsspannung zu ermitteln. Dies ist entscheidend für die Auswahl des richtigen Materials und Durchmessers. Die Wahl des Materials wirkt sich direkt auf die Festigkeit und Haltbarkeit aus.
Ein wichtiges Anliegen ist Ermüdungsbruch13. Da sich die Wellen drehen, kommt es zu ständigen Belastungszyklen. Diese wiederholte Belastung kann dazu führen, dass sich Risse bilden und im Laufe der Zeit wachsen, selbst wenn die Spannung unter der Bruchfestigkeit des Materials liegt.
Überlegungen zur Schachtkonstruktion
| Faktor | Bedeutung | Grund |
|---|---|---|
| Materialstärke | Hoch | Muss kombinierten Belastungen standhalten. |
| Stress-Konzentratoren | Hoch | Nuten und Schultern bilden Schwachstellen. |
| Durchbiegungsgrenze | Hoch | Sorgt für korrekten Zahnkontakt. |
| Standort des Lagers | Hoch | Beeinflusst Biegemomente und Stabilität. |
Schließlich prüfen wir die Durchbiegung. Eine übermäßige Durchbiegung der Welle führt zu einer Fehlausrichtung der Zahnräder. Dies führt zu Geräuschen, erhöhtem Verschleiß und schließlich zum Ausfall des Systems. Unser Ziel ist es, die Durchbiegung innerhalb sehr enger, akzeptabler Grenzen zu halten, um ein ordnungsgemäßes Ineinandergreifen zu gewährleisten.
Die korrekte Konstruktion einer Welle ist ein detaillierter Prozess. Wir analysieren die Kräfte, bestimmen die Momente und berechnen den Durchmesser. Dadurch wird sichergestellt, dass die Welle einer Ermüdung standhält und die Durchbiegung für einen zuverlässigen Zahneingriff minimiert wird - ein Kernprinzip, das wir bei unseren Projekten bei PTSMAKE anwenden.
Wie wird bei einem Duplex-Schneckensystem eine Spielkontrolle erreicht?
Ein Duplex-Schneckensystem ist eine fortschrittliche Lösung zur Beseitigung von Spiel. Es ist unerlässlich für Anwendungen, bei denen Präzision nicht verhandelbar ist.
Dieser Mechanismus verwendet eine Schnecke mit zwei leicht unterschiedlichen Profilen. Dies ermöglicht eine Feinabstimmung des Zahneingriffs.
Das Kernkonzept
Der Wurm ist praktisch in zwei Abschnitte unterteilt. Jeder hat einen leicht unterschiedlichen Steigungswinkel. Dies ist der Schlüssel zu ihrer Einstellbarkeit. Durch die axiale Bewegung wird der Eingriff verändert und jegliches Spiel beseitigt.
Warum es wichtig ist
Bei Präzisionsmaschinen können selbst winzige Lücken Fehler verursachen. Diese Konstruktion gewährleistet eine enge, genaue Bewegungsübertragung.
| Merkmal | Standard-Schnecke | Duplex-Schnecke |
|---|---|---|
| Backlash | Feststehend, inhärent | Einstellbar bis fast auf Null |
| Komplexität | Einfach | Komplexer |
| Kosten | Unter | Höher |
| Präzision | Gut | Außergewöhnlich |
Dieser fortschrittliche Ansatz zur Schnecke und Schneckenraddesign bietet hervorragende Kontrolle.

Die Mechanik der Anpassung
Ein Duplex-Schneckengetriebesystem erreicht eine Spielkontrolle durch eine einzigartige Konstruktion. Die Schnecke selbst ist mit zwei unterschiedlichen Steigungsprofilen an ihren gegenüberliegenden Zahnflanken konstruiert.
Eine Flanke hat eine etwas größere Steigung als die andere. Dieser feine Unterschied wird bei der Herstellung in die Schnecke eingearbeitet. Es handelt sich nicht um eine einfache Teilung, sondern um eine raffinierte geometrische Abweichung.
Null Rückschläge erreichen
Um das Spiel einzustellen, wird die Schnecke axial relativ zum Schneckenrad verschoben. Wenn sich die Schnecke verschiebt, greifen die verschiedenen Steigungsprofile an unterschiedlichen Punkten in die Radzähne ein.
Durch diese axiale Bewegung wird das Zahnprofil der Schnecke an der Berührungsstelle effektiv "verdickt". Dadurch werden die Schneckenradzähne von beiden Seiten geschoben, wodurch der Spalt zwischen ihnen beseitigt und jegliches Spiel entfernt wird. Dieser Prozess ermöglicht eine extrem feine und präzise Einstellung, um ein Spiel von nahezu Null zu erreichen. Die Website Schrägungswinkel14 spielt bei diesem Anpassungsprozess eine entscheidende Rolle.
Anwendungen im Bereich Präzisionsmaschinenbau
Bei PTSMAKE haben wir solche Systeme in hochpräzise Anwendungen integriert. Sie sind für die Robotik, CNC-Maschinen und astronomische Teleskope unerlässlich. Diese Bereiche erfordern eine exakte Positionierung ohne Spielraum für Fehler.
| Industrie | Anmeldung | Grund für die Verwendung |
|---|---|---|
| Robotik | Gelenke artikulieren | Sanfte, präzise Bewegung |
| Luft- und Raumfahrt | Steuerung des Stellantriebs | Hohe Zuverlässigkeit, spielfrei |
| Metrologie | CMM-Maschinen | Extreme Positionierungsgenauigkeit |
| Medizinische | Chirurgische Roboter | Einwandfreie Bewegungskontrolle |
Das Duplex-System sorgt dafür, dass die Maschine ihre Aufgabe mit einem Höchstmaß an Genauigkeit und Wiederholbarkeit erfüllt.
Das Duplex-Schneckensystem verwendet eine Schnecke mit zwei Steigungsprofilen. Durch axiales Verschieben der Schnecke wird der Zahneingriff eingestellt, wodurch das Spiel eliminiert wird. Diese Konstruktion ist entscheidend, um höchste Präzision in modernen Maschinen zu erreichen.
Wie würden Sie einen Schneckenantrieb für ein Robotergelenk entwerfen?
Die Entwicklung eines modernen Robotergelenks ist eine echte Herausforderung. Es geht nicht nur um Bewegung, sondern auch um extreme Präzision.
Sie müssen mehrere widersprüchliche Ziele auf einmal erreichen. Dazu gehören Spielfreiheit für Genauigkeit und hohe Steifigkeit für schnelle Reaktionen.
Zentrale Design-Herausforderungen
| Anforderung | Auswirkungen auf die Leistung |
|---|---|
| Rückwirkungsfrei | Ermöglicht eine präzise Positionskontrolle. |
| Hohe Steifigkeit | Sorgt für sofortige, reaktionsschnelle Bewegung. |
| Geringe Trägheit | Ermöglicht eine schnelle Beschleunigung/Abbremsung. |
| Kompaktheit | Passt in enge Robotergelenkräume. |
Dies erzwingt eine Synthese von Materialien und Geometrie.
Teile2:

Teile3:
Gehen wir diese Anforderungen der Reihe nach an. Das Ziel ist die Schaffung eines nahtlosen, integrierten Systems.
Null Rückschläge erreichen
Die Beseitigung des Spiels ist entscheidend für die Genauigkeit des Roboters. Ein einfacher Zahnradsatz reicht nicht aus.
Eine wirksame Methode ist die Verwendung eines Duplex-Schneckengetriebe15. Diese Konstruktion verfügt über eine Schnecke mit einer variablen Steigung. Dadurch können wir den Eingriff mit dem Schneckenrad präzise einstellen und jegliches Spiel effektiv beseitigen. Dies ist ein gängiger Ansatz bei früheren Projekten von PTSMAKE für hochpräzise Anwendungen.
Ausgewogene Steifigkeit und geringe Trägheit
Die Steifigkeit sorgt dafür, dass sich der Roboterarm unter Last nicht verbiegt. Geringe Trägheit ermöglicht eine schnelle Bewegung. Diese beiden Aspekte stehen oft im Widerspruch zueinander.
Bei der Konstruktion von Schnecken und Schneckenrädern ist die Wahl des Materials entscheidend.
| Komponente | Optimales Material | Begründung |
|---|---|---|
| Wurm | Gehärteter Stahl (z. B. 4140) | Hohe Festigkeit und Verschleißfestigkeit. |
| Schneckenrad | Phosphor-Bronze | Ausgezeichnete Schmierfähigkeit und Haltbarkeit. |
| Gehäuse | 7075 Aluminium | Hohes Verhältnis von Festigkeit zu Gewicht. |
Um die Trägheit weiter zu verringern, können wir die Schnecke mit einer Hohlwelle konstruieren. Wir setzen fortschrittliche CNC-Bearbeitung ein, um diese komplexen, leichten Teile herzustellen, ohne die Festigkeit zu beeinträchtigen. Diese Integration von Design und Fertigung ist der Schlüssel.
Teile4:
Zusammenfassend lässt sich sagen, dass die Entwicklung eines Schneckenantriebs für Roboter eine Übung in Optimierung ist. Sie erfordert einen ganzheitlichen Ansatz, bei dem fortschrittliche Zahnradgeometrie, strategische Materialauswahl und enge Systemintegration kombiniert werden, um die strengen Anforderungen an Präzision, Reaktionsfähigkeit und Kompaktheit zu erfüllen.
Teile5:
Bringen Sie Ihr Schnecken- und Schneckenraddesign mit PTSMAKE weiter
Sind Sie bereit, hochpräzise Schnecken- und Schneckenradkonstruktionen in die Produktionsrealität umzusetzen? Wenden Sie sich an PTSMAKE, um ein schnelles, zuverlässiges und detailliertes Angebot zu erhalten - erleben Sie nahtlose Kommunikation, verlässliche Qualität und pünktliche Lieferung für Ihr nächstes Projekt. Senden Sie uns noch heute Ihre Anfrage und lassen Sie die Präzisionsfertigung Ihren Erfolg unterstützen!

Entdecken Sie, wie sich dieser Winkel direkt auf die Effizienz und die Selbsthemmung des Antriebs auswirkt. ↩
Entdecken Sie, wie sich dieser Schlüsselwert direkt auf die Selbsthemmung und die Gesamteffizienz von Getrieben auswirkt. ↩
Klicken Sie hier, um zu erfahren, wie der Steigungswinkel berechnet wird und welche Rolle er bei der Optimierung des Wirkungsgrads von Schneckengetrieben spielt. ↩
Erfahren Sie, wie diese Materialeigenschaft für die Vorhersage und Gewährleistung des selbstsichernden Verhaltens in Ihren Konstruktionen entscheidend ist. ↩
Erfahren Sie, wie dieses Konstruktionsprinzip die Lebensdauer von mechanischen Systemen verlängert. ↩
Verstehen Sie, wie Bewegung und Kräfte in Getriebesystemen übertragen werden, um Ihre Konstruktionen zu verbessern. ↩
Entdecken Sie, wie dieser dünne Film Zahnradversagen unter extremem Druck und Belastung verhindert. ↩
Verstehen Sie, wie dieses Prinzip eine gleichmäßige und konstante Kraftübertragung im Getriebe gewährleistet. ↩
Erfahren Sie, wie Schmierungsfehler zu schweren Getriebeschäden führen und welche Maßnahmen Sie ergreifen können, um dies zu verhindern. ↩
Verstehen Sie, wie die Wechselwirkung von Oberflächen die Reibung, den Verschleiß und die Lebensdauer Ihrer Getriebekomponenten beeinflusst. ↩
Klicken Sie hier, um zu verstehen, wie ein Flüssigkeitsfilm die Reibung und den Verschleiß in Ihrem Getriebesystem reduziert. ↩
Erfahren Sie in unserem detaillierten Leitfaden, wie der Eingriffswinkel die Leistung des Getriebes und die Kraftverteilung beeinflusst. ↩
Entdecken Sie, wie wiederholte Belastungen unterhalb der Streckgrenze mit der Zeit zu Materialversagen führen können. ↩
Verstehen Sie, wie wichtig dieser Winkel für den Zahneingriff und die Kontrolle des Zahnflankenspiels ist. ↩
Entdecken Sie, wie diese fortschrittliche Getriebetechnologie das Spiel eliminiert und für ultimative Präzisionskontrolle sorgt. ↩